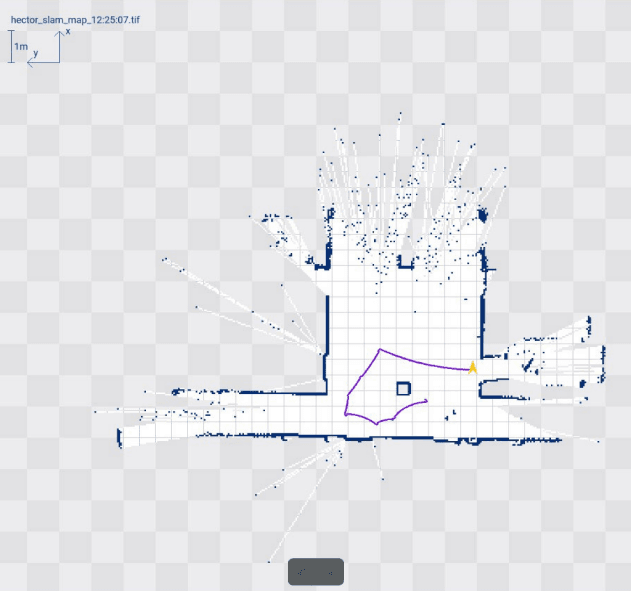
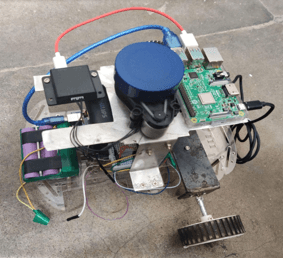
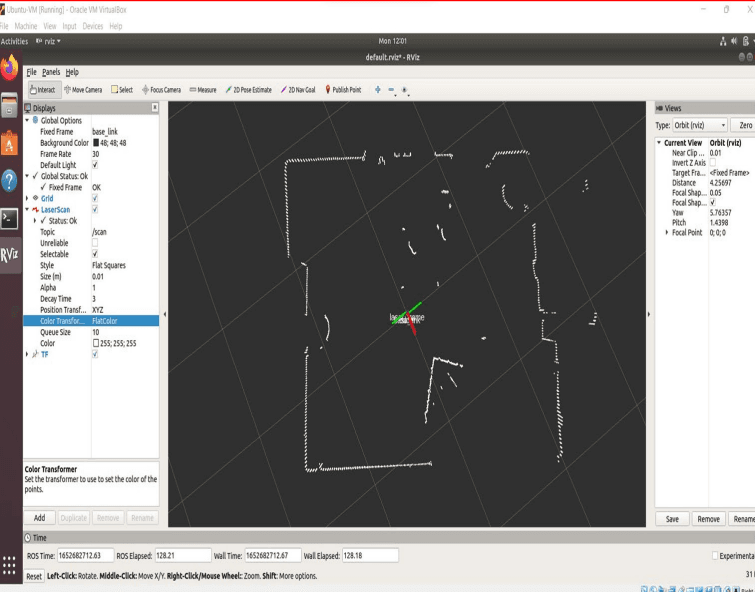
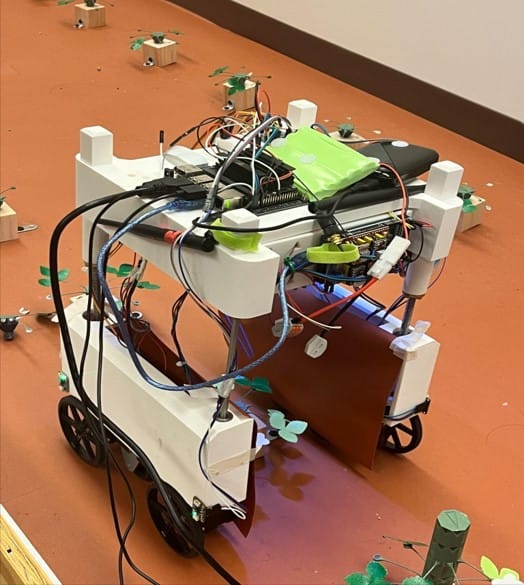
Autonomous Mobile Robot for Agricultural Automation
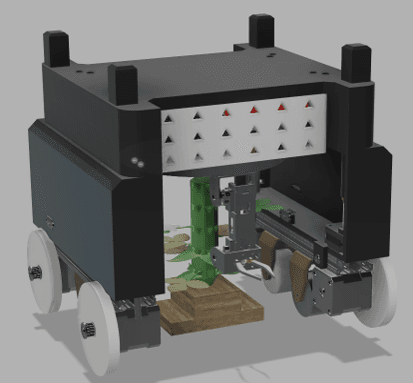
Testing servo and stepper motor controls for automated plant trimming mechanism
Iteration 1

Iteration 2
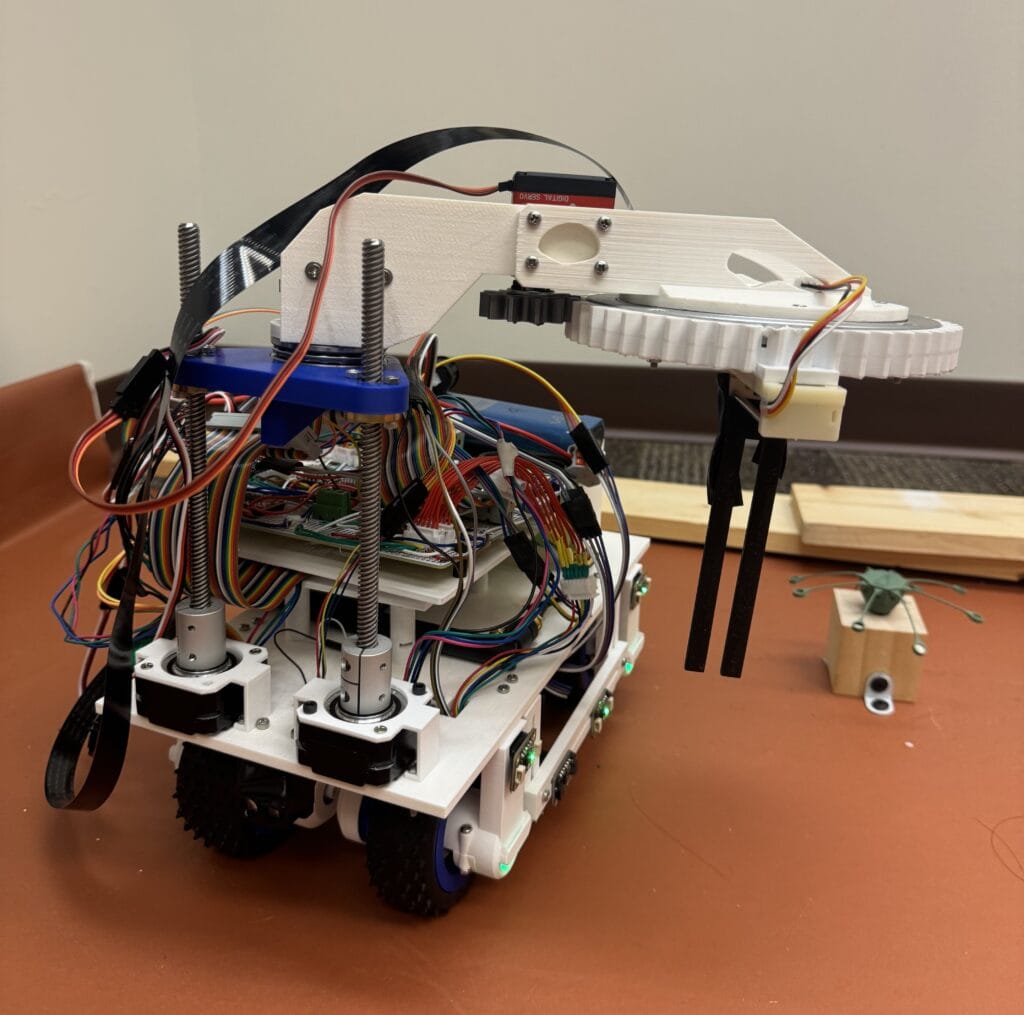
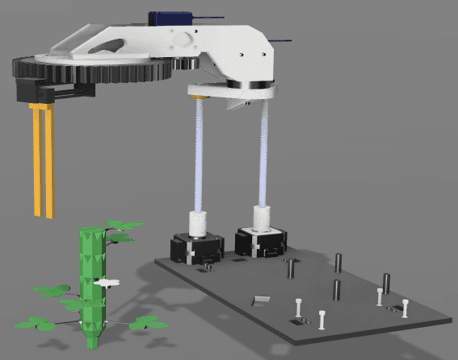
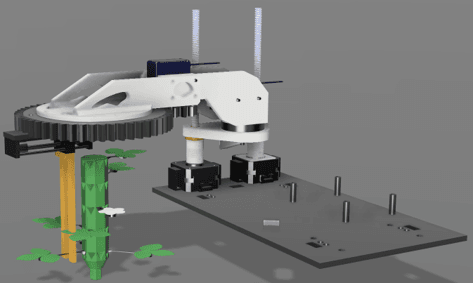
Testing servo and stepper motor controls for automated plant trimming mechanism
Untethered Microcombustion for Soft Elastomeric Actuators


Bio-Inspired Vibrating Soft Actuator for Underwater Acoustic Applications